빠른 동작을 위한 모터가 없는 액추에이터
KAIST에서 개발한 스마트 소재 기반 액추에이터는 모터를 사용하지 않고 1초도 안 되는 시간에 작동해 가볍고 반복적인 움직임이 필요한 로봇공학과 우주 구조물에 새로운 옵션을 제시합니다.기존의 모터 기반 시스템은 무게와 복잡한 구조로 인해 한계에 직면해 있습니다.
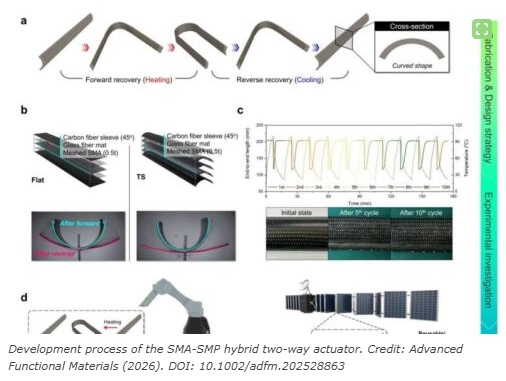
액추에이터는 가역적인 자체 형상 변경이 가능한 양방향 형상 기억 재료 시스템을 기반으로 합니다.열 등 외부 자극에 노출되면 소재의 형태가 변했다가 별도의 기계 장치 없이 원래의 형태로 돌아오는 소재다.
형상기억합금(SMA)과 형상기억폴리머(SMP)를 결합해 두 소재의 장점을 살린 제품이다.SMA는 가열하면 원래 모양으로 돌아가는 금속이고, SMP는 열이나 기타 외부 입력에 반응하여 모양이 바뀌는 폴리머입니다.
이전의 형상 기억 재료에는 한계가 있었습니다.일부는 변형 후 원래 형태로 돌아오지 못했고, 다른 일부는 회복이 더디게 나타났습니다.금속과 폴리머의 강성 차이로 인해 반복 사용 시 정확도가 감소했습니다.
이러한 문제를 해결하기 위해 팀은 재료와 구조를 모두 수정했습니다.SMP 조성을 조정하고 탄소섬유로 보강하여 강성을 높였습니다.액츄에이터에는 개폐식 줄자와 유사한 테이프 스프링 구조도 적용되었습니다.
이 구조는 변형 중에 저장된 에너지가 빠르게 방출되는 스냅스루 효과를 가능하게 합니다.이는 이동 속도와 정확도를 모두 향상시킵니다.
액추에이터는 완전한 양방향 작동을 보여줍니다.가열하면 구부러지고 온도가 낮아지면 편평한 상태로 돌아갑니다.또한 더 높은 변형 범위를 나타내며 원래 모양으로 완전히 회복됩니다.복구 속도가 향상되어 복잡한 제어 시스템 없이도 반복 작동이 가능합니다.
이 연구는 단일 시스템에서 양방향 변형, 1초 미만의 작동 속도 및 정확한 배치를 보여줍니다.이는 로봇 그리퍼 및 배치 가능한 공간 구조와 같은 응용 분야에서 형상 기억 소재 기반 액추에이터의 실용화를 향한 진전을 나타냅니다.